Various omnidirectional wheel mechanism implementation technologies
Omnidirectional Autonomous Driving Technology
Autonomous Navigation Software in ROS 2 developed with our own technology
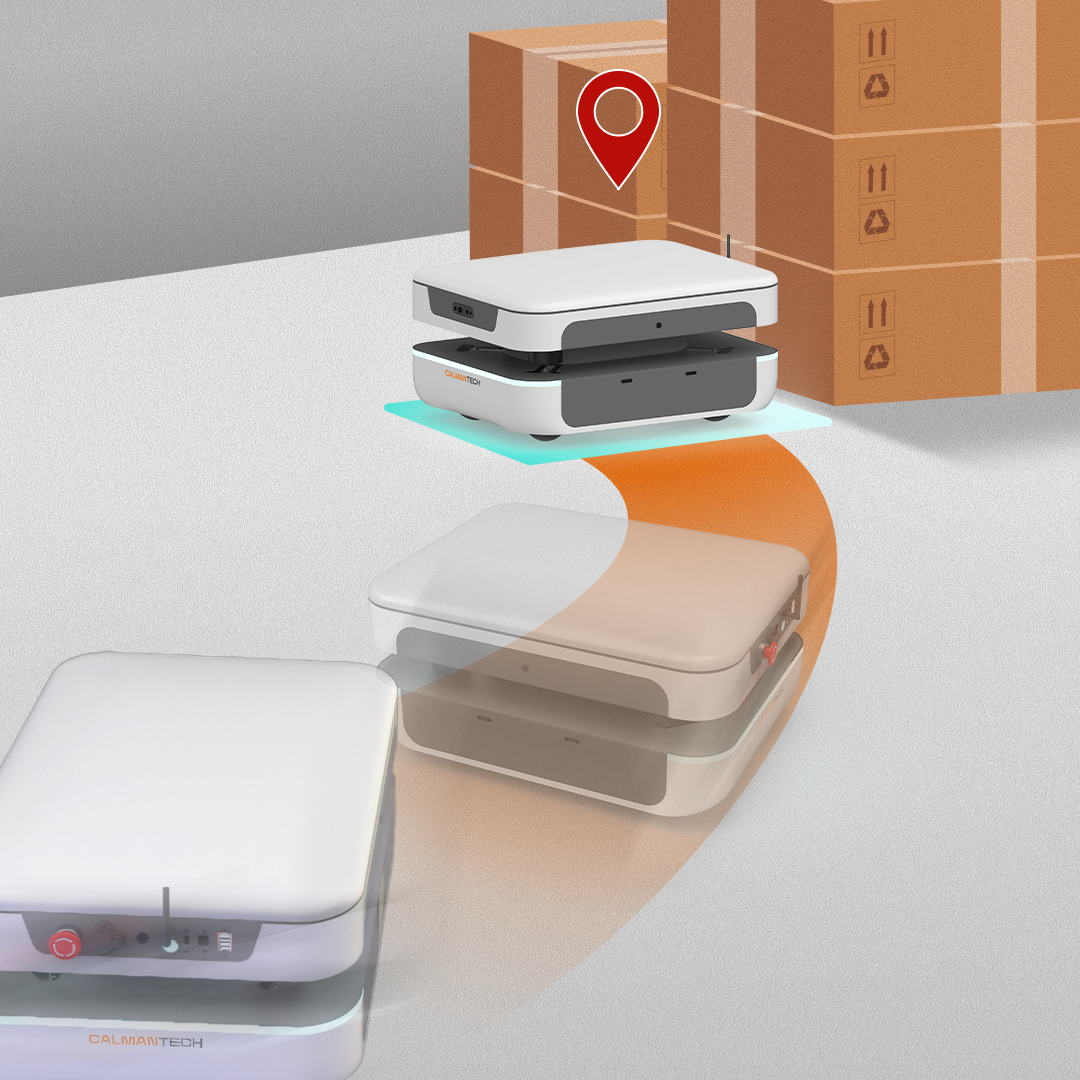
High-precision Navigation
Localization & Mapping
- High-precision Vision SLAM-based Localization and Mapping
- Localization correction technology via IMU and Wheel Odometry
Path Planning: Driving by selecting the optimal path or fixed path
High-precision Autonomous Docking System
Fast and precision docking without failure with omnidirectional movement
Precision docking accuracy within ±2mm
Fast docking within 7s (from 1m approach)
No need to build additional equipment or infrastructure such as docking guides
2025 Upgrade Technology
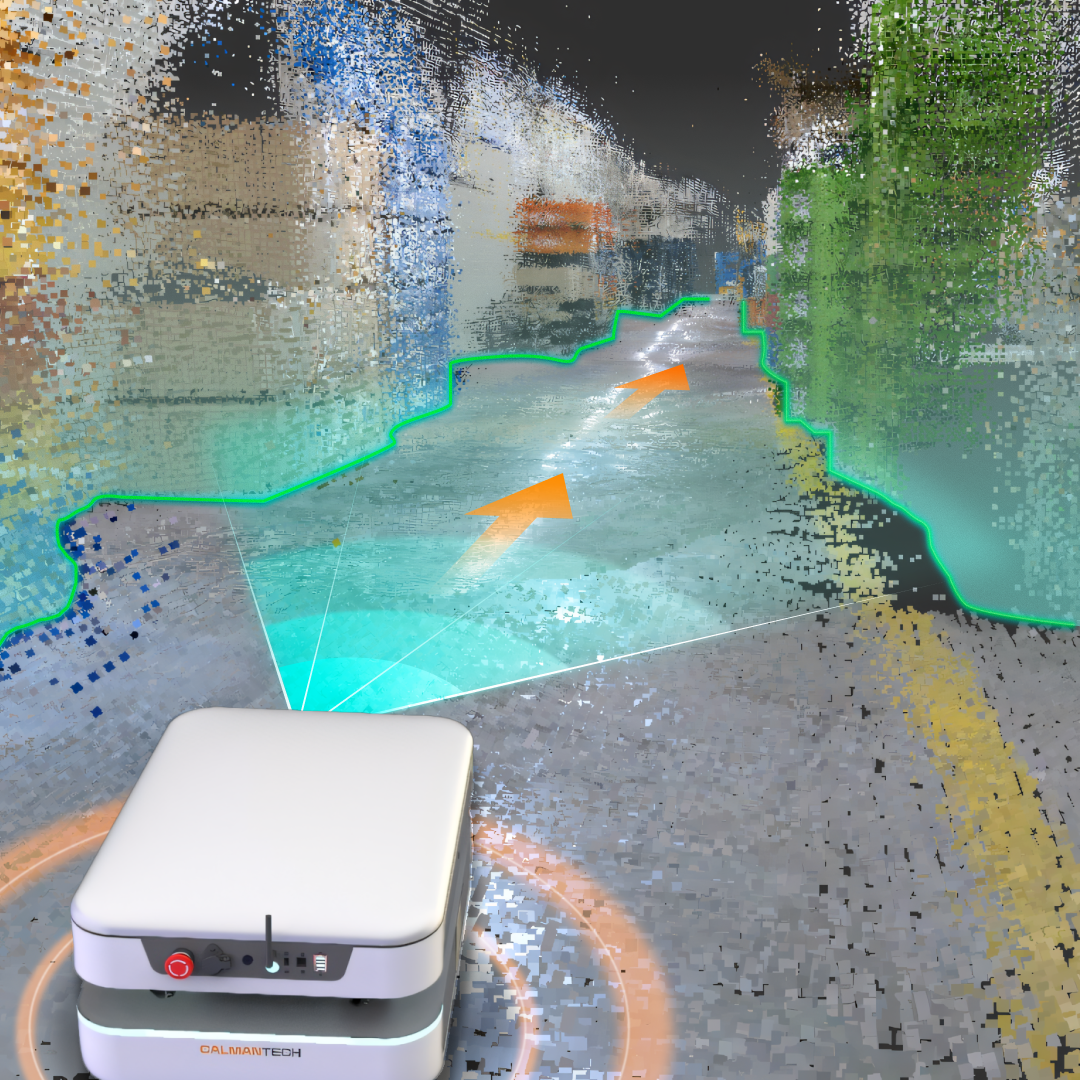
High-Density 3D Mapping Using 2D LiDAR and RGB Camera
CMB Flow.AI introduces two breakthrough capabilities not available in previous models, enabling more flexible and precise autonomous driving with AI and outperforming conventional systems.
Creates richer and denser 3D map than conventional 3D LiDAR by fusing 2D LiDAR with RGB camera data
Delivers high-precision localization and mapping at a fraction of the cost of 3D LiDAR-based systems
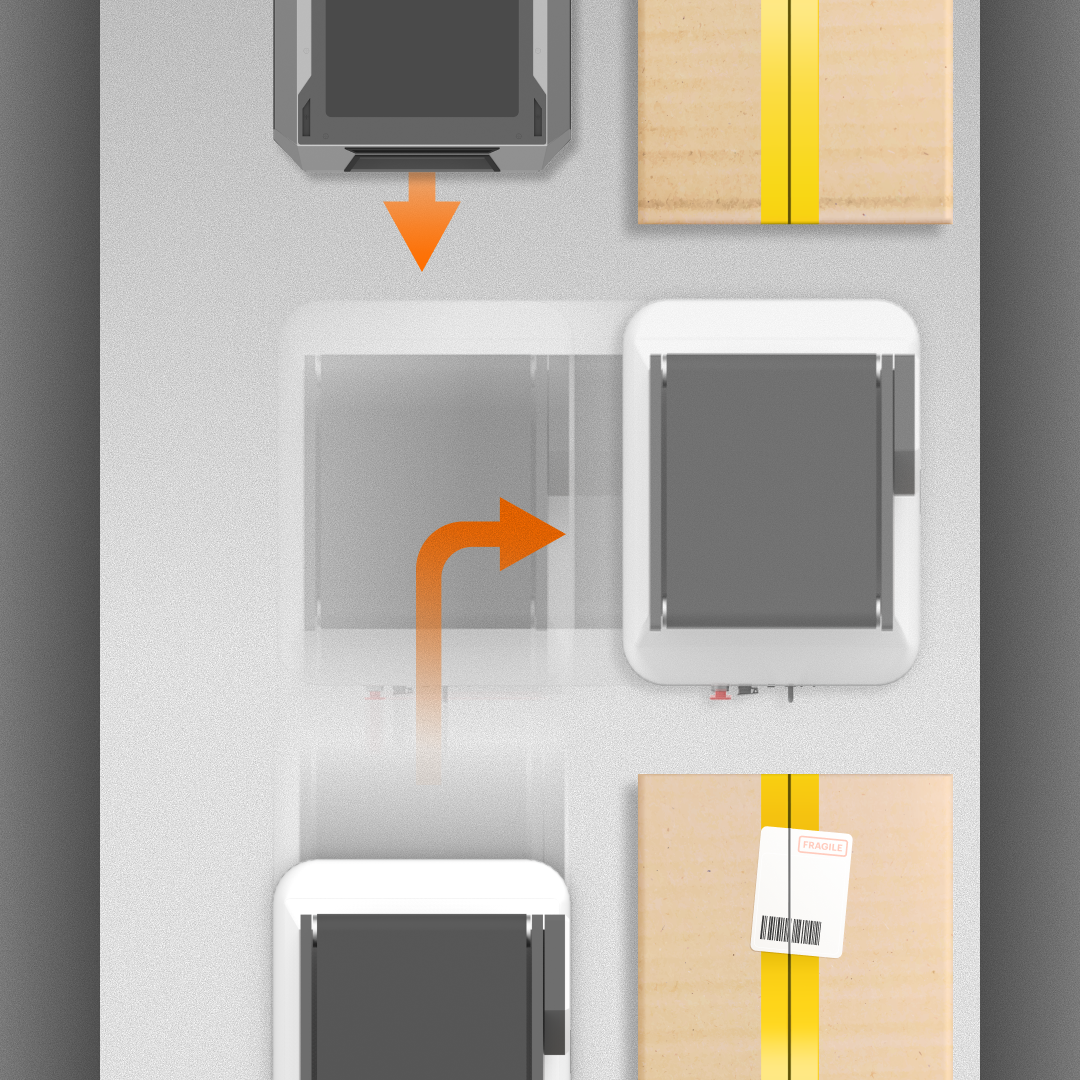
Autonomous Driving in Narrow and Complex Environments
Efficient mobility via omnidirectional driving mechanism
Driving path planning
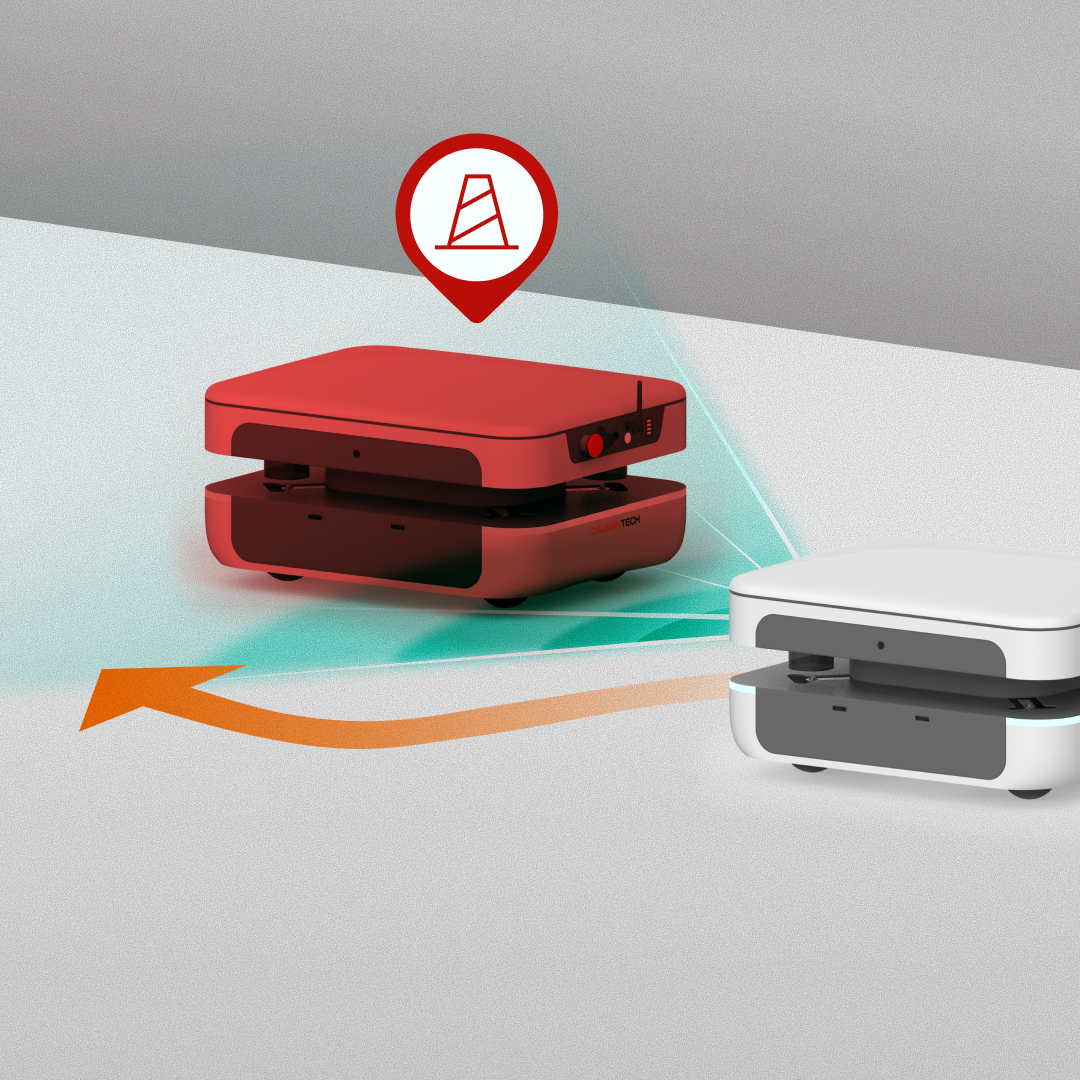
Dynamic obstacle detection
Multi-obstacle detection
Passing through narrow paths (min. 70cm)
Vision-based obstacle detection
Driving path detection
- Dynamic obstacle detection and avoidance
- Passing through narrow paths (min. 70cm)
Safety Sensors
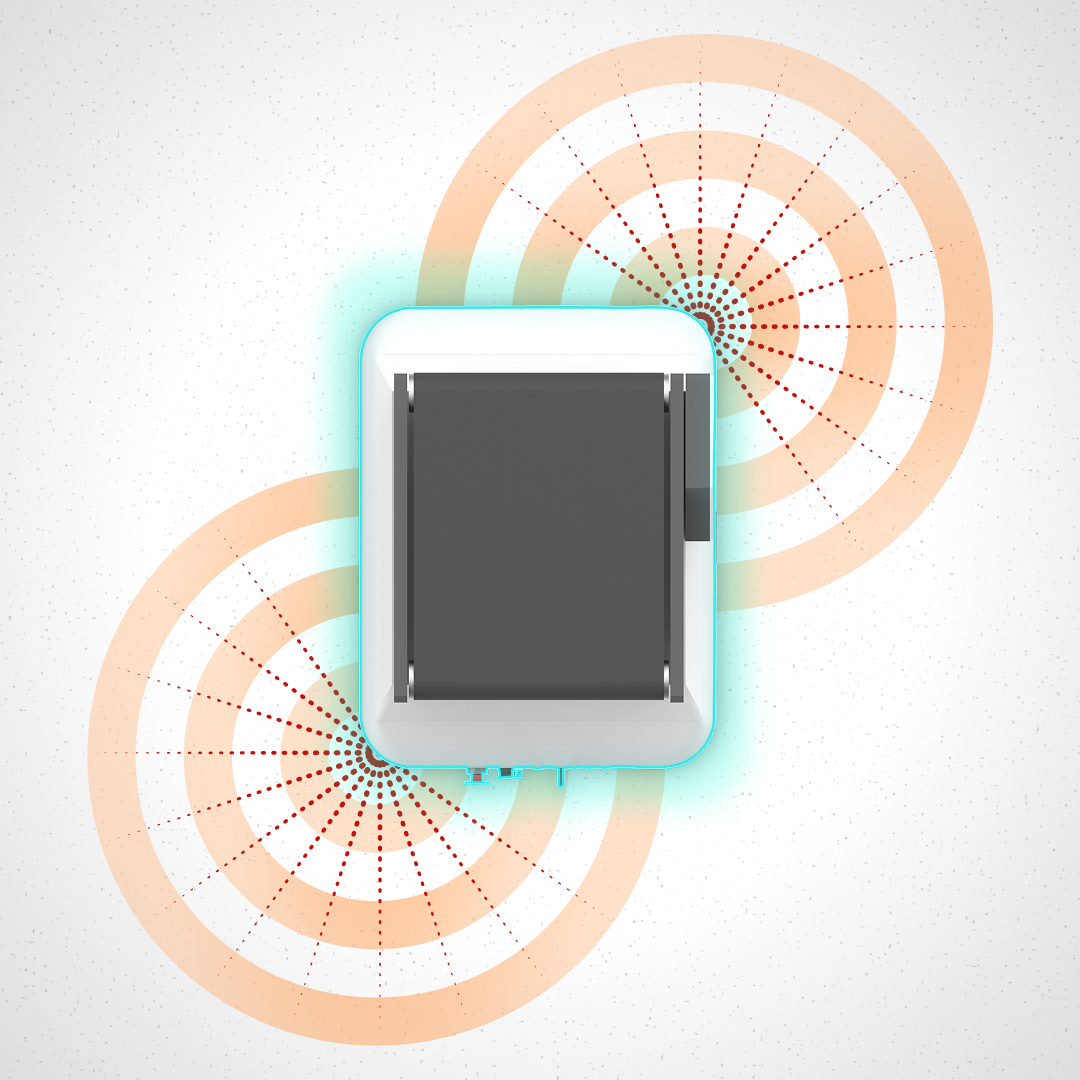
360° Omnidirectional Obstacle Detection
360° Omnidirectional Obstacle Detection with 2D Lidar
Immediately stops driving through bumper sensors when contacting an obstacle (protects both workers and robots)
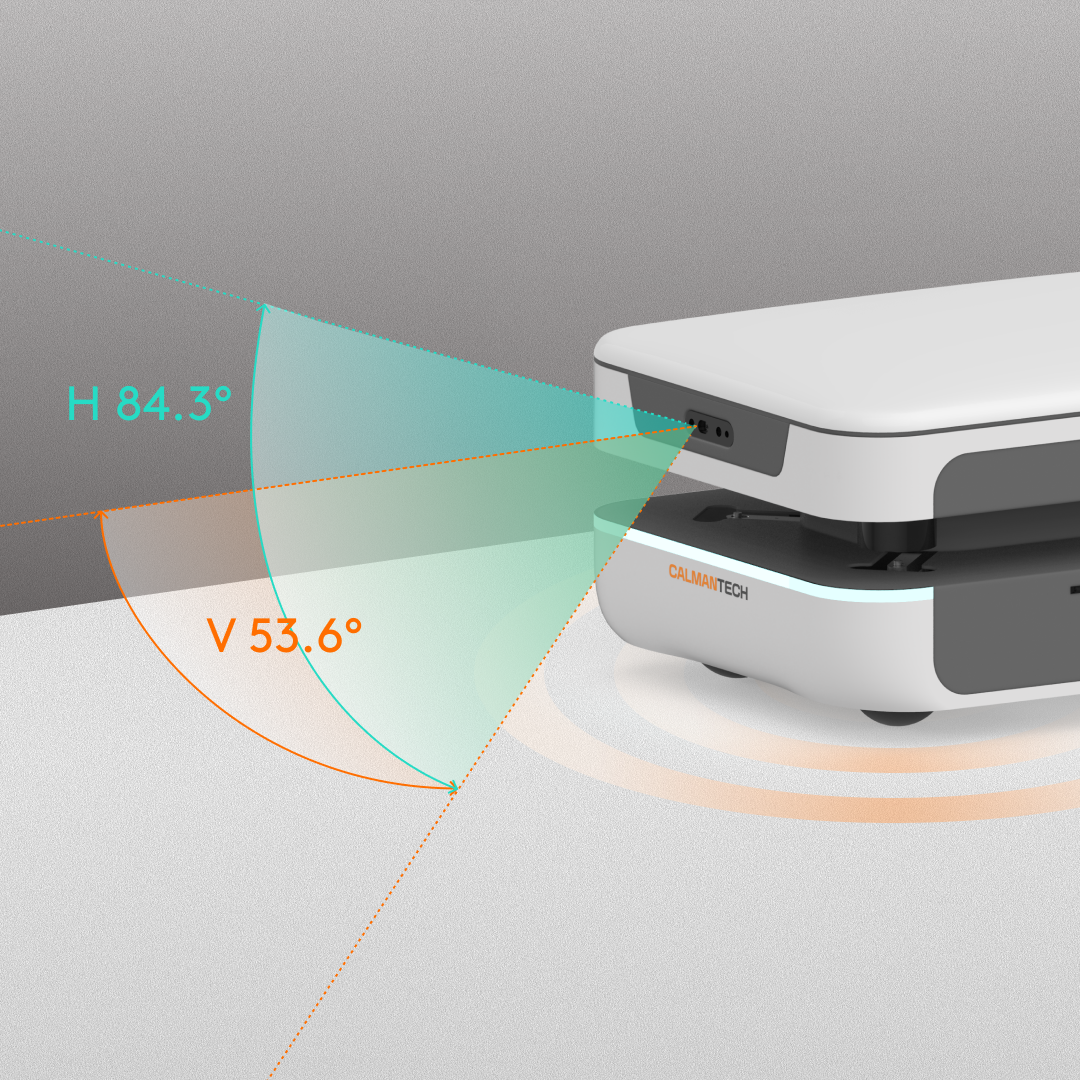
RGBDepth camera
Front & side obstacle detection and accurate distance detection
Covering angle H 84.3° / V 53.6°
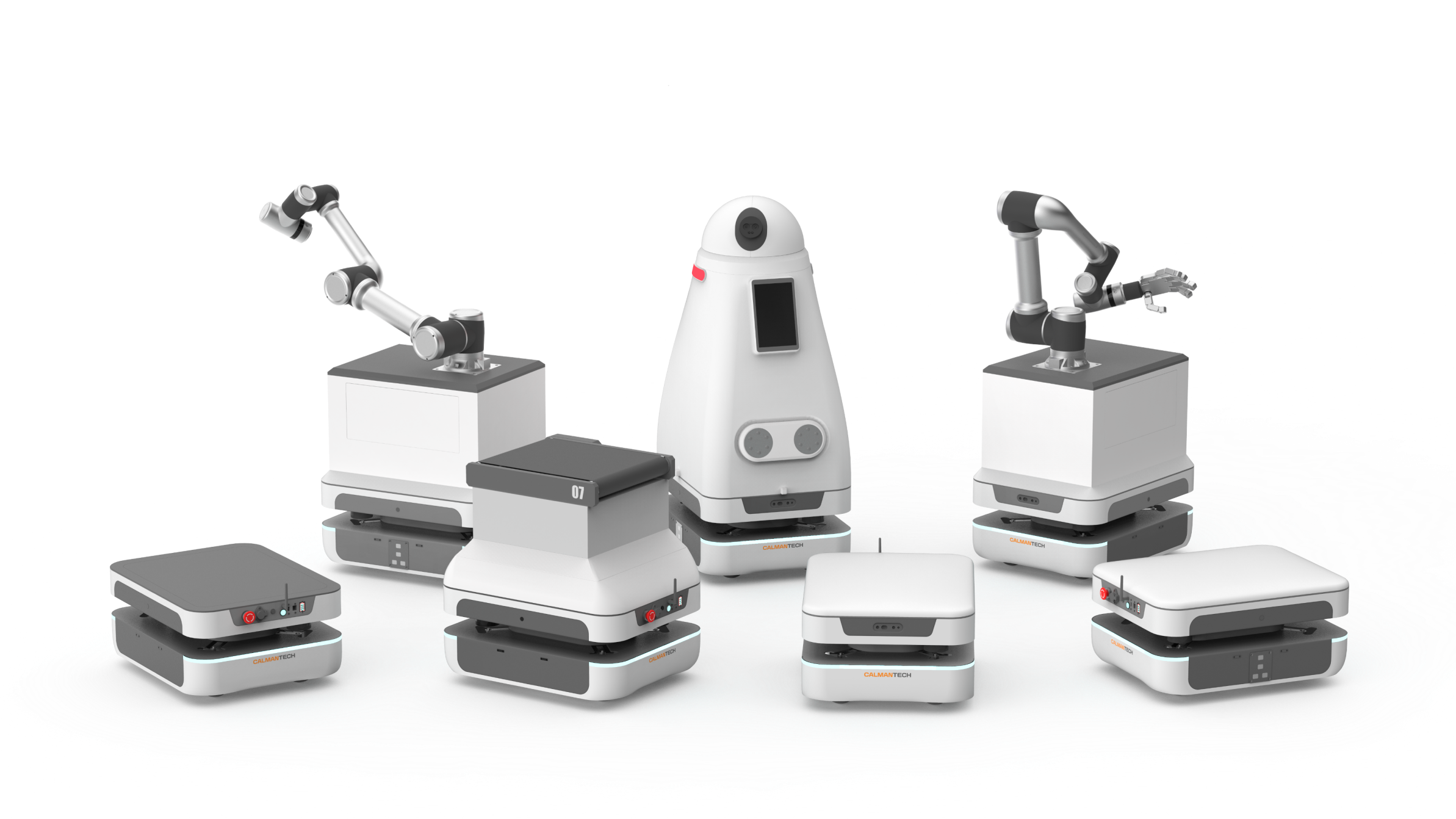
PRODUCT
CMB Flow.AI
Ball wheel-based omnidirectional autonomous mobile robot (AMR) with high-precision position control